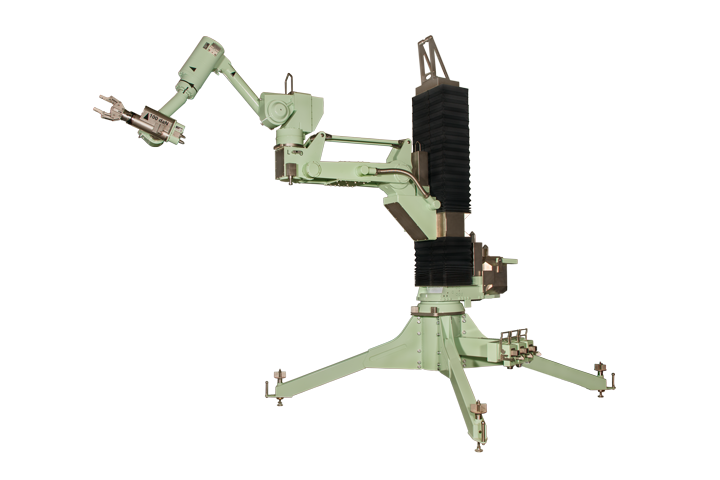
A1000S robot power manipulator:
Power combined with robotic intelligence.

The A1000S power pack convinces by high loads, 3-D simulation, programmability and high quality.
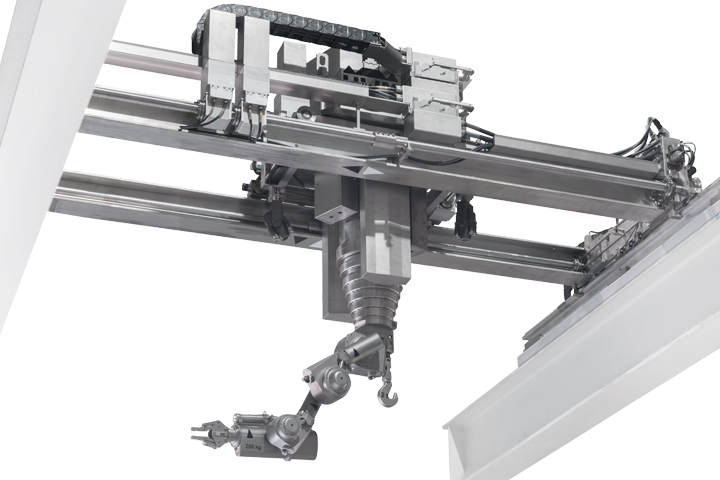
The A1000S is used in areas which are inaccessible to human operators - in the nuclear industry, nuclear research or chemical plants. In these locations it moves radioactive material and carries out dismantling, decontamination, maintenance tasks or heavy work in hot cells.
The A1000S robot: Argument in figures
All the advantages of the A1000S Series at a glance
The A1000S has been developed from the A1000 Series of power manipulators. With all the important advantages of the A1000:
- easy to decontaminate
- no external cabling
- virtually maintenance-free
- external mechanical emergency drive for each joint
- remotely-controlled changing of arm elements possible
- robust and extremely reliable

As if drawn with a ruler: super-precise control
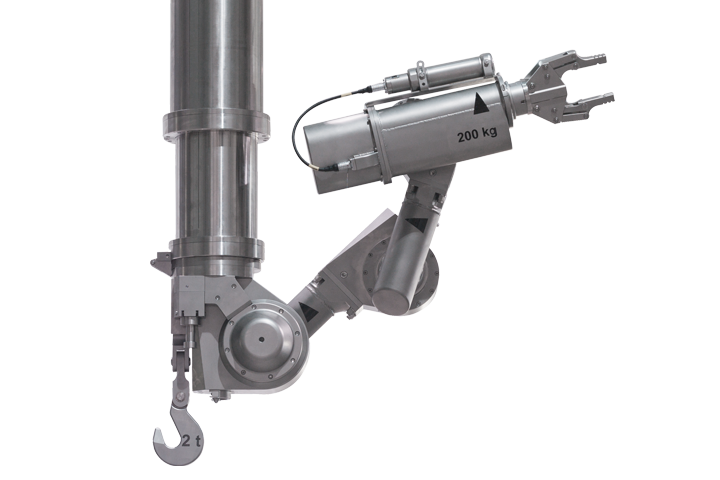
No jolting, no jerking: With the A1000S-robot you can make extremely precise linear motions. The secret here: The Cartesian control function. This makes it possible, for example, to set precise cutting with an angle grinder for dismantling.
Extremely efficient thanks to its teach-and-repeat function: The "Go-To"-mode
The "Go-To"-mode is a teach-and-repeat method for the A1000S robot: With it, you set exact points to be reached (teach) and let these be moved to as many times as necessary (repeat).
Repeated work processes are carried out semi-automatically. This makes the work with the A1000S considerably easier. Operator errors due to monotony are also eliminated.
Are you using different tools? Then save the position of each tool and let the robot carry out tool changing semi-automatically.
As with any automation, manual intervention is, of course, possible at any time. This avoids collisions and maintains the overview with the aid of 3-D simulation.
The whole work environment and the A1000S robot are modelled in detail in 3-D. This makes working in confined spaces and places with poor visibility much easier, e.g. when your view is restricted.
As all motion are simulated in real-time, 3-D simulation includes also collision detection. The collision warning devices send signals and stop the arm before any damage can be caused. This useful safety feature helps you to prevent accidents and operator errors.
Find out about the A1000 power manipulator in more detail and also about the origins of the A1000S! >
